
Speed & Acceleration Control (V4.3.2)
General information about design and simulation
Even today, good acceleration/speed control for different vehicles still has problems with:
- Optimal transient behavior
- Tractive force dynamics
- Disturbance variable behavior (down- and uphill slopes)
- Different vehicle masses
I offer a tool with which a control can be implemented and simulated easily (with graphical representation). A control principle that has proven itself worldwide and for a long time for:
- Freight trains (different train masses)
- Trams
- Regional trains
- Intercity Trains
- High-speed trains with ATO, automatic drive / brake control under ETCS / LZB
- Electric cars
- Integration of the controller into an ATO with calculation of the braking curves from the ETCS track data
- JSON track file simulation (also ATO) See also: https://github.com/dkouzoup/TTOBench/
The tool can also be used for electro cars! (not yet tested).
The control uses only a few (10) simple functions to implement the controller (adding, limiting, multiplying, differentiating, integrating).
The controller is not implemented according to traditional control technology, but it has decisive advantages.
The speed control will behave properly if the information on the parameterization and the controlled system are made like described!
Parameters must be specified for the simulation
(Parameter sets for various vehicles are preconfigured and can be loaded).
Vehicle parameters:
- Processing time in the software (cycle time) [s]
- Dead time (change in tractive force until the speed signal reacts at the control input) [s]
- Vehicle mass [T]
- Maximum tractive force ramp [kN / s]
- Maximum tractive force [kN]
- Maximum braking force [kN]
- Maximum driving/braking power [MW]
- Maximum acceleration [ms-2]
- Gradient (uphill / downhill) [in kN inertia tractive effort]
- Mechanical brake
Many parameters can be changed during the simulation.
Control parameters:
-
Differential gain (for settling, acceleration, deceleration)
only one parameter has to be adjusted when vehicle mass is changing and this parameter changes with the root of the vehicle mass, so it is not critical in case of not exact vehicle mass! - differential time constant
- proportional gain
If acceleration have to be changed during acceleration, only a differential gain needs to be adjusted. So there is no influence on the control behavior!
Simulation parameters:
- Demanded speed
- Simulation time (fast, slow, real time)
- Step by step - processing
- Gradient change
- etc.
During the simulation: display of the control structure with fading in of the data.
All values can be changed during the simulation and the control behavior can be observed at the same time.
Every important parameter and every important signal will be described when the mouse pointer moves over it.
The control principle (incl. graphics) and the tool are described in the tool.

Configurations for various vehicles are predefined in the tool:
- Tram
- Intercity train
- Freight train
- Regional train
- Electric car
- High speed train
- etc.
Tool view (main window)

Automatic Train Control (ATO or ATC) under ETCS
It is also possible to simulate the behaviour of a train under ATO with simulated track data.
The tool describes exactly how to do this (generating the braking curves according to ETCS track data (distances to braking points, target speeds, etc.).
The structure of the controller makes it very easy to integrate the speed controller into an ATO. It only needs to be intervened in two places as soon as the train is to follow the braking curve.
Very simple!
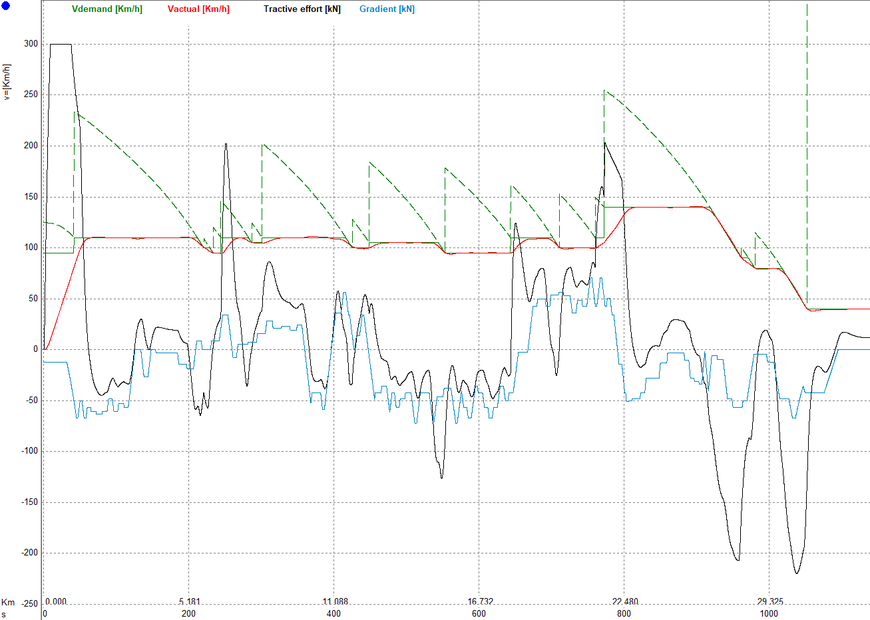
Simulation run Fribourg-Bern, using Json track data.
Speed and gradient changes as a function of distance (km).
See also:
GitHub - dkouzoup/TTOBench: Open track data for benchmarking of train trajectory optimization algorithms
https://github.com/dkouzoup/TTOBench/
Train:
Interregio with Re460 (6.1MW, max. 300kN)
Mass: 500T
Brake curve with deceleration of 0.32ms-1
ATO Examples:
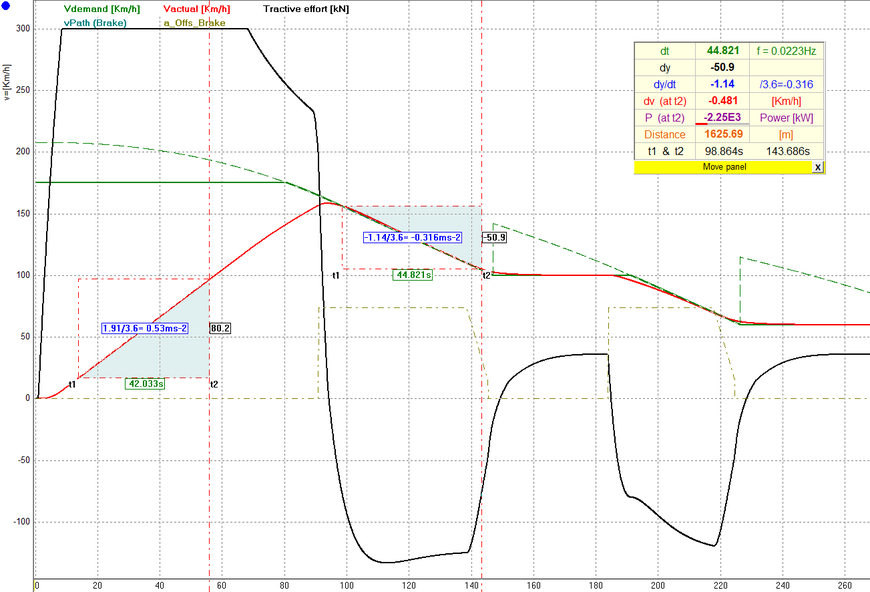

Tool Overview

Tool Download V4.3.2
Descriptions and many functions are locked and only available after entering a password!
To make all options available, please enter your password (Menu "Info", "Enter password")
The password is available from me.
Important remark:
With this control principle, the acceleration/deceleration limit is not set via a target acceleration, but only via the factor of the actual acceleration calculation.
This often leads to confusion, but is the essential feature of this control system to ensure good dynamic behaviour, including disturbance variable behaviour!
Additional information (with picture) has been added to ensure that the principle of this control is correctly understood.
Wichtige Bemerkung:
Bei diesem Regelprinzip wird die Beschleunigungs/Verzögerungs-Begrenzung nicht über eine Sollbeschleunigung, sondern nur über den Faktor der Ist-Beschleinigungs-Berechnung eingestellt. Dies führte oft zur Verwirrung, ist aber das Essentielle dieser Regelung, um ein gutes dynamisches Verhalten, auch Störgrössenverhalten, zu gewährleisten!
Damit das Prinzip dieser Regelung richtig verstanden wird, ist eine Zusatzinformation (mit Bild) hinzugefügt worden.
Please note:
I will continuously publish newer versions on my website.
Please consult the website regularly and use the latest versions.
Video: you will see an information about a very good speed control.
Video: Information about the parameters for speed control processes for a 50T vehicle (Tram)
If you are interested, the password can be requested from me.
Video: Instructions on how to stop the vehicle using the speed control for a 50T vehicle (Tram)
If you are interested, the password can be requested from me.